





ESC — электронный регулятор оборотов, который получает команду от полётного контроллера и управляет током в фазах мотора. Именно от него во многом зависит, насколько точно меняются обороты двигателя квадрокоптера, как быстро дрон реагирует на команды и насколько стабильно держит режим под нагрузкой. Ниже — полный разбор: что это, как работает, какие бывают ESC, как выбрать подходящий вариант и каких ошибок избегать.
«При подборе ESC важны не только ток и напряжение. На практике сбои чаще возникают из-за неверной связки мотор — аккумулятор — протокол — охлаждение, чем из-за самого номинала на этикетке». — ID Technology
Для B2B-закупки это базовый узел. Если выбрать ESC без запаса по длительному току, без учёта S-диапазона батареи и без корректной схемы подключения, система с повышенной вероятностью столкнётся с перегревом, рассинхронизацией или отказом на пиковых режимах. Это практическое наблюдение, а не строгий статистический вывод: конкретный результат зависит от профиля нагрузки, охлаждения, прошивки и качества компонентов.
Информация носит общий технический характер и не заменяет инженерную верификацию совместимости компонентов и условий эксплуатации.
Что такое ESC и зачем он нужен в квадрокоптере
Если объяснять простыми словами, ESC — это контроллер оборотов двигателя, который преобразует команду управления в последовательность силовых импульсов для мотора. Такой регулятор скорости нужен, чтобы бесколлекторный двигатель не просто вращался, а точно создавал требуемую тягу.
ESC стоит между источником питания и мотором и получает управляющий сигнал от полётного контроллера. Далее он обрабатывает этот сигнал микроконтроллером и через силовые ключи подаёт ток на нужные фазы. Поэтому регулятор скорости — это не просто «переключатель газа», а полноценный силовой вычислительный узел.
Важно понимать архитектуру питания. В квадрокоптере ESC получает силовое питание напрямую от аккумулятора или через распределительную плату (PDB). Полётный контроллер подаёт не питание мотора, а только управляющий сигнал — и в ряде конфигураций принимает телеметрию обратно.
Схема выглядит так:
Схема выглядит так:
- Питание: Аккумулятор → PDB/ESC → Мотор (3 фазных провода)
- Управление: Полётный контроллер → ESC (сигнальный провод + земля)

Что ESC не делает. Он не управляет навигацией, не обрабатывает данные гироскопа и не является полётным контроллером. Если регулятор подобран неверно, дрон теряет стабильность: моторы могут рассинхронизироваться, появляются вибрации, а в критических случаях один или несколько каналов тяги отказывают.
Принцип работы: от сигнала к крутящему моменту
Чтобы понять выбор ESC, полезно сначала разобраться в базовой логике работы. По сути, регулятор превращает команду от FC в точно рассчитанную коммутацию фаз мотора — от этого зависит и отклик, и плавность, и устойчивость под нагрузкой.
Как ESC контроллер управляет оборотами двигателя
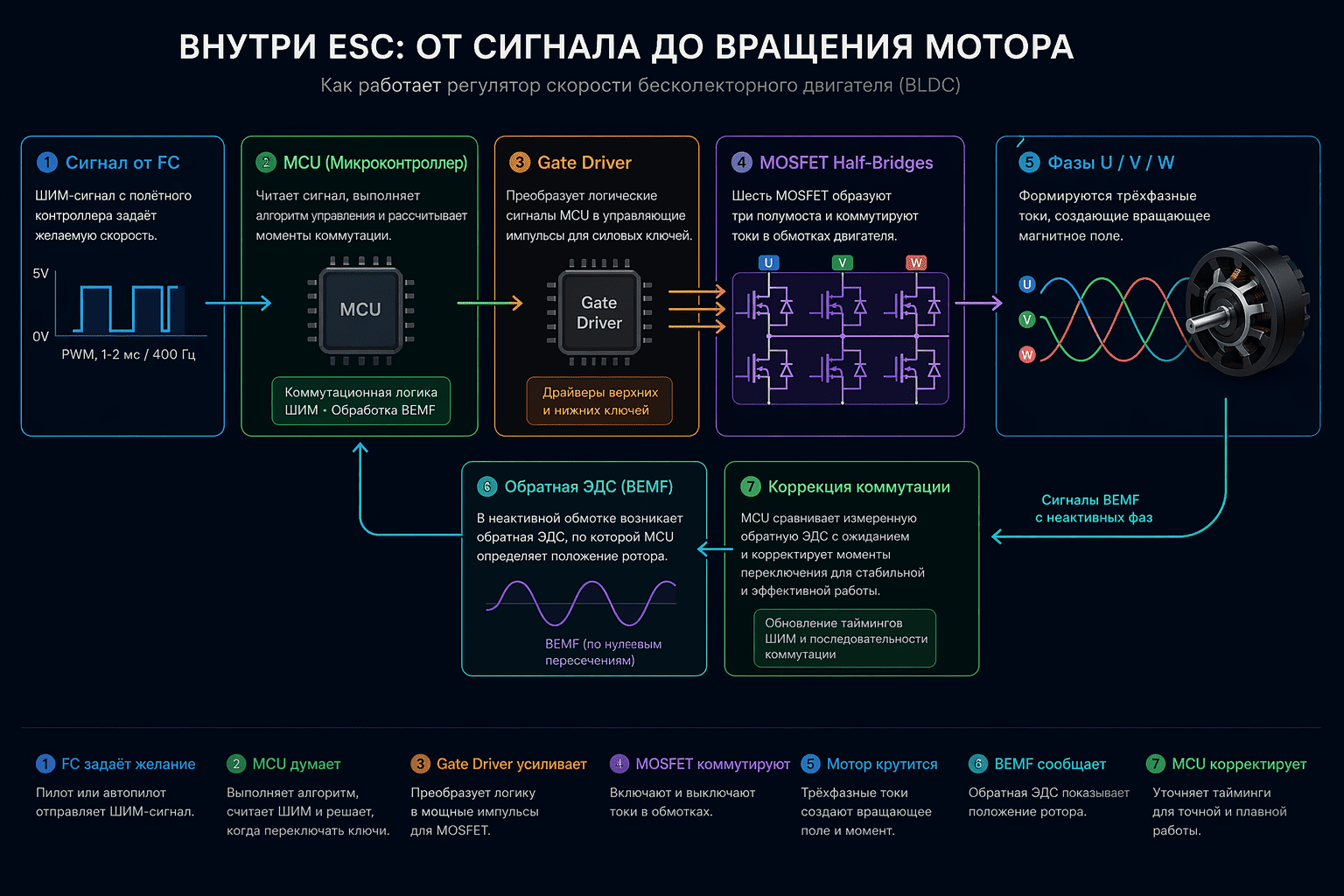
ESC работает так: получает команду тяги, вычисляет момент коммутации и подаёт ток в фазы мотора в нужной последовательности. На выходе формируется крутящий момент, а затем — нужные обороты двигателя.
Типовая цепочка выглядит так:
- Полётный контроллер отправляет сигнал управления (PWM, OneShot или DShot).
- Микроконтроллер ESC декодирует команду в 6 ШИМ-сигналов (UH_PWM–WL_PWM).
- Драйвер затвора (gate driver) управляет MOSFET-ключами в мостовой схеме.
- Силовые ключи коммутируют фазы U/V/W мотора.
- В бессенсорных (sensorless) BLDC-системах обратная ЭДС свободной фазы помогает оценить положение ротора и скорректировать момент переключения.
Цифровые протоколы DShot передают 16-битный кадр с контрольной суммой (4 бита CRC), что позволяет проверять целостность каждого пакета. В отличие от аналоговых протоколов (PWM, OneShot), DShot не требует калибровки газа: минимальное и максимальное значения задаются цифровым кодом, без аналогового джиттера.
Именно поэтому современные цифровые протоколы ценятся не только за скорость, но и за предсказуемость поведения системы. Для вас это означает меньше проблем с настройкой и более стабильный отклик в полёте.
Регулятор оборотов для бесколлекторного двигателя: ключевые особенности
Регулятор оборотов бесколлекторного двигателя — это трёхфазный электронный коммутатор. В BLDC-системе нет щёток, поэтому ESC сам синхронизирует фазы мотора и следит за тем, чтобы двигатель не сорвался в рассинхронизацию.
Это повышает требования к алгоритмам управления, но даёт преимущества по КПД и ресурсу за счёт отсутствия механического износа щёток. Поэтому ESC для BLDC обычно работает сложнее и точнее, чем контроллер для щёточного мотора. Особенно это заметно на высоких KV и при резких шагах газа — именно в таких режимах проблемы синхронизации проявляются раньше всего.
Примечание: количественные сравнения КПД и ресурса зависят от конкретных моделей моторов и условий эксплуатации. Приведённые в ряде источников диапазоны (КПД 85–95% для BLDC, 70–80% для коллекторных) являются ориентировочными и требуют верификации по datasheet конкретных компонентов.
Практический смысл простой: для квадрокоптера нужен именно тот ESC, который рассчитан на быструю и точную работу с бесколлекторным мотором, а не любой «регулятор оборотов» по названию.
Устройство и принципиальная схема ESC
Полезно понимать, из каких узлов состоит ESC. Это помогает не только при выборе, но и при диагностике: по набору компонентов уже можно судить о тепловом запасе, устойчивости к всплескам напряжения и совместимости с вашей схемой питания.
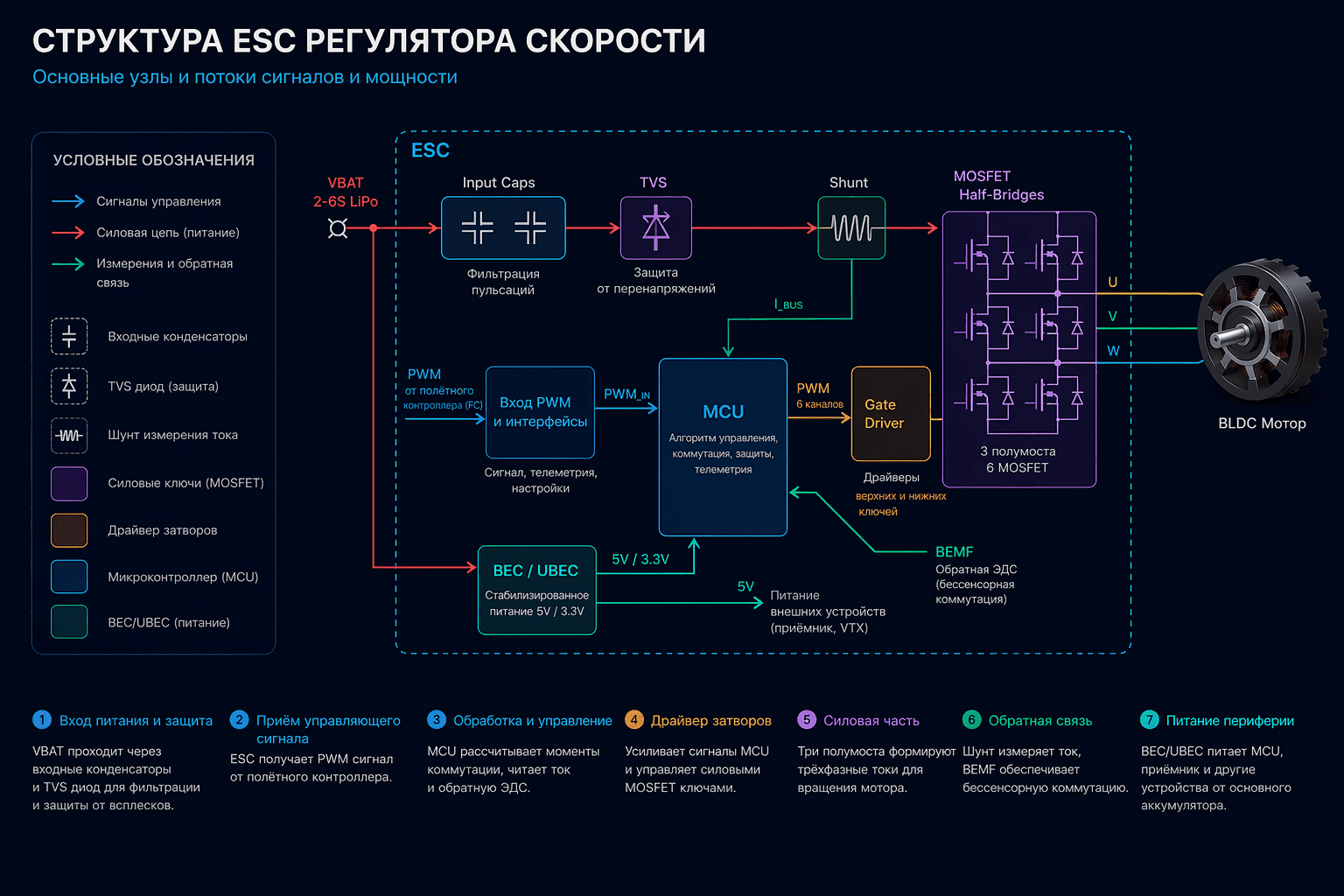
Типовой ESC включает следующие узлы: MCU (микроконтроллер), gate driver (драйвер затвора), MOSFET half-bridges (силовые ключи), шунт для измерения тока, входные конденсаторы, TVS-диод и иногда BEC/UBEC. Именно эта базовая архитектура во многом определяет потери, нагрев и надёжность.
Функции ключевых узлов:
- MCU — генерирует ШИМ-сигналы для gate driver, декодирует входящий протокол (DShot/PWM).
- Gate driver — усиливает сигналы MCU до уровня, достаточного для управления затворами MOSFET; обеспечивает надёжное переключение ключей и ток затвора до нескольких ампер.
- MOSFET half-bridges — силовые ключи, коммутирующие фазы мотора; ключевой параметр — Rds(on), то есть сопротивление сток-исток в открытом состоянии.
- Шунт — измеряет ток для обратной связи в MCU.
- TVS-диод — защищает от пиковых всплесков напряжения, которые возникают при резких токах и паразитной индуктивности длинных проводов.
- Входные конденсаторы (low-ESR) — буферизируют питание и сглаживают всплески напряжения.
- BEC/UBEC — стабилизатор для питания FC и периферии (5 В) от напряжения батареи.
Параметр Rds(on) силовых MOSFET напрямую влияет на тепловыделение: проводимые потери в упрощённом виде описываются формулой P = I² × Rds(on). Это только одна из составляющих потерь, наряду с переключательными, но в практическом выборе параметр очень показателен. ESC с более низким Rds(on) при прочих равных обычно меньше греется на том же токе.
BEC vs UBEC. Линейный стабилизатор (BEC) прост по схеме, но имеет низкий КПД при высоком входном напряжении — например, около 34% при 4S. Импульсный стабилизатор (UBEC) эффективнее (около 89% КПД при 4S), меньше греется, но может создавать радиочастотные помехи в питающей цепи. ESC без BEC (Opto) используют с внешним UBEC — это типично для RC-вертолётов с гироскопами и сервами, где особенно важна чистота питания.
Если вам нужна надёжная сборка, смотрите не только на «ампераж» на коробке, но и на эту внутреннюю архитектуру. Именно она часто показывает, насколько спокойно ESC переживёт реальную нагрузку.
Какие бывают ESC: классификация и форм-факторы
Здесь важно не просто перечислить типы, а понять, какой вариант лучше подходит под вашу задачу: компактная сборка, ремонтопригодность, длительная нагрузка или простота монтажа.
По форм-фактору: 4-in-1 или одиночные ESC
4-in-1 ESC — это четыре канала на одной плате. Преимущества: компактность, меньший вес, меньше паек и удобное подключение в стек. В ряде сборок это также даёт экономию 50–100 г по сравнению с четырьмя одиночными ESC. Недостатки тоже важны: при отказе одного канала обычно меняют всю плату, а тепловая концентрация выше, что при аварийных режимах повышает риск для соседних компонентов.
Одиночные ESC — по одному на каждый мотор. Их сильные стороны: лучший теплоотвод, более простая диагностика и возможность заменить только один канал. Недостатки — больше проводов, сложнее монтаж и выше суммарный вес.
Практическое правило:
- Для компактных квадрокоптеров (3""–5"") — 4-in-1 обычно удобнее.
- Для тяжёлых, сервисных или высоконагруженных платформ (7""+, industrial) — одиночные ESC чаще предпочтительнее из-за ремонтопригодности и охлаждения.
По типу двигателя
- BLDC ESC (бесколлекторные) — трёхфазный коммутатор, основной тип для квадрокоптеров.
- Brushed ESC (коллекторные) — для щёточных моторов, схема заметно проще.
По наличию BEC
- С BEC/UBEC — со встроенным стабилизатором питания для FC и периферии.
- Opto (без BEC) — требуют внешнего источника питания для FC.
Если вы собираете дрон не «в вакууме», а под конкретный сценарий, этот выбор быстро становится практическим: что для вас важнее — компактность, сервис, охлаждение или простота замены узла.
Прошивки и протоколы: BLHeli_S, BLHeli_32, AM32, DShot
Прошивка и протокол управления напрямую влияют на совместимость, телеметрию, качество отклика и возможности настройки. Именно здесь часто скрываются ограничения, которые не видны по одному только номиналу тока.
Прошивки ESC
BLHeli_S работает на 8/16-битных микроконтроллерах (ATMEL/SILABS). Поддерживает DShot300/600 и базовую телеметрию. По возможностям она скромнее, чем BLHeli_32, но остаётся распространённой в бюджетных ESC.
BLHeli_32 работает на 32-битных STM32 (F0/F330/F396, ARM Cortex-M0, до 48 МГц). Это закрытая прошивка. Её ключевые функции: телеметрия RPM/ток/температура, DShot600/1200, адаптивный тайминг, настройка через BLHeliSuite32, поддержка RPM-фильтрации в Betaflight. К 2025–2026 годам она стала стандартом де-факто для FPV-дронов.
AM32 — открытая прошивка (репозиторий GitHub: am32-firmware/AM32), работающая на STM32F051/G071 и других MCU. Поддерживает DShot300/600, bidirectional DShot, ESC/KISS-телеметрию, sinusoidal startup. Совместима с Betaflight/INAV. Прошивка активно развивается сообществом; в 2025 году появилось портирование на отечественный К1946ВК035.
Протоколы управления
Перед таблицей полезно держать в голове простой ориентир: аналоговые протоколы старше и требовательнее к калибровке, цифровые — удобнее для современной сборки и диагностики.
Bidirectional DShot — это расширение протокола, при котором ESC отправляет обратно данные об оборотах (RPM). Благодаря этому полётный контроллер может использовать RPM-фильтрацию: notch-фильтры настраиваются по реальным оборотам моторов, что заметно снижает вибрационный шум и улучшает стабилизацию. Но функция полезна только тогда, когда её поддерживают и прошивка ESC, и сам FC.
Практическая рекомендация. Для большинства современных FPV-квадрокоптеров оптимален DShot600 с bidirectional DShot и RPM-фильтрацией в Betaflight. DShot300 остаётся хорошим вариантом при длинных кабелях или в тех случаях, когда у вас есть проблемы с помехами.
Именно этот блок часто определяет, получите ли вы просто «работающую» систему или действительно удобную в настройке и диагностике сборку.
Как выбрать ESC для квадрокоптера: 7 шагов
При выборе ESC недостаточно смотреть только на цифру тока на этикетке. Проверять нужно связку параметров: тип мотора, напряжение батареи, длительный ток, формат платы, прошивку и поддерживаемые протоколы. Если хотя бы один из этих пунктов не совпадает с конфигурацией дрона, возрастает риск перегрева, рассинхронизации, потери телеметрии или отказа под нагрузкой.
Шаг 1. Определите класс дрона и сценарий полёта.
Freestyle, cinewhoop, long range, industrial — у каждого сценария свои требования к динамике, весу и надёжности.
Шаг 2. Возьмите мотор как отправную точку.
Изучите datasheet мотора: размер, KV, предполагаемый пропеллер, максимальный ток на полном газу.
Шаг 3. Определите батарею и S-диапазон.
Убедитесь, что ESC поддерживает ваш S-диапазон (4S, 6S, 8S). Подключение батареи с напряжением выше допустимого диапазона ESC — прямой путь к выходу узла из строя.
Шаг 4. Выбирайте ESC по длительному, а не только по пиковому току.
Практическое правило: минимальный ток ESC = максимальный пиковый ток мотора × 1,3. То есть нужен запас около 30%. Например, если мотор даёт 40 А на полном газу, ESC нужен минимум на 52 А. Пиковый (burst) ток ESC — это кратковременный показатель на секунды, и ориентироваться на него как на рабочий режим не стоит.
Шаг 5. Решите: 4-in-1 или одиночные ESC.
Для компактных платформ чаще удобнее 4-in-1. Для тяжёлых и сервисных — одиночные ESC.
Шаг 6. Проверьте протоколы, телеметрию и прошивку.
Убедитесь в совместимости с вашим FC по протоколу (например, DShot300/600), проверьте поддержку bidirectional DShot для RPM-фильтрации и наличие нужной прошивки (BLHeli_32, AM32).
Шаг 7. Проверьте охлаждение, монтаж и защитные элементы.
Оцените поток воздуха через ESC в вашей раме, монтажные размеры (30×30, 20×20, 25,5×25,5 мм), наличие входного low-ESR конденсатора и TVS-диода.
Если пройти эти шаги последовательно, выбор становится намного спокойнее: вы оцениваете не абстрактный ESC, а его реальную совместимость с вашей системой.
Таблица подбора ESC под типовые сценарии
Эта таблица поможет быстро сузить выбор. Используйте её как ориентир, а финальную совместимость всё равно сверяйте по datasheet мотора, батареи и самой платы ESC.
Для компактных и «гоночных» сборок приоритетом обычно будет плотная компоновка. Для long range и industrial-платформ — предсказуемость под длительной нагрузкой, телеметрия и удобство обслуживания.
Ключевые параметры ESC: что смотреть в спецификации
Ниже — параметры, которые действительно имеют значение при выборе. Удобно идти по таблице сверху вниз и сразу отмечать, что критично именно для вашей сборки.
Эта таблица особенно полезна, если вы сравниваете несколько моделей и хотите не потеряться в маркетинговых описаниях. Она возвращает выбор к сути: совместимость, тепло, питание и диагностика.
Типичные ошибки при подборе ESC
Самая частая ошибка — ориентироваться только на номинальный ток и игнорировать батарею, мотор и охлаждение. На практике ESC выходит из строя не только из-за «слабого» номинала, но и из-за неверно собранной силовой цепи в целом.
- Выбор по пиковому, а не по длительному току. Пиковый ток — это секунды. Рабочий режим определяется continuous current.
- Игнорирование S-диапазона батареи. ESC на 4S сгорит при подключении 6S-батареи. Совместимость по напряжению нужно проверять всегда.
- Несовместимость с FC по протоколу или телеметрии. Не все FC поддерживают bidirectional DShot, и не все ESC поддерживают нужную версию прошивки.
- Выбор 4-in-1 там, где критична ремонтопригодность. Для тяжёлых платформ отказ одного канала не должен автоматически означать замену всей платы.
- Отсутствие low-ESR конденсатора на входе. При длинных силовых проводах (более 10 см) паразитная индуктивность создаёт всплески напряжения, которые могут пробить MOSFET.
- Плохой теплоотвод и отсутствие потока воздуха. ESC без обдува способен перегреваться даже при номинальном токе.
- Неверная пайка фаз мотора. При перепутанных фазах мотор может вращаться не в ту сторону или дёргаться при старте.
- Игнорирование прошивки. Устаревшая прошивка ESC может не поддерживать нужные функции FC или содержать известные баги, связанные с рассинхронизацией.
Если вы исключите хотя бы эти ошибки, вероятность проблем при первом запуске и под нагрузкой заметно снизится.
Диагностика: симптом → причина → что проверить
Этот блок удобен как быстрый чек-лист при поиске неисправности. Он не заменяет полноценную диагностику, но помогает не идти наугад.
Если симптом повторяется, не ограничивайтесь одной причиной из таблицы. Для силовой электроники типична ситуация, когда проблема возникает из-за нескольких факторов сразу: например, просадки питания плюс недостаточного охлаждения.
Чем ESC для дрона отличается от регулятора для авто или промышленного привода
Это сравнение полезно, если вы выбираете между «похожими по виду» устройствами. Внешнее сходство здесь обманчиво: требования к отклику, протоколам и режимам работы у этих классов оборудования разные.
Автомобильный ESC не подходит для квадрокоптера. Он не поддерживает DShot, имеет неподходящую динамику отклика и алгоритмы, не рассчитанные на синхронное управление четырьмя каналами с жёсткими требованиями к стабилизации. Это принципиально разные устройства, даже если внешне они кажутся похожими.
Для вас практический вывод простой: регулятор нужно выбирать не по общему слову «ESC», а по конкретному типу применения.
B2B-закупка ESC: критерии для серийных сборок
Если вы закупаете ESC партиями для серийной сборки дронов, одного номинала тока недостаточно. Важны унификация, совместимость, повторяемость по партиям и предсказуемость обслуживания. Вот ключевые критерии:
- Унификация по стеку и прошивке. Все ESC в партии должны иметь одинаковую прошивку и её версию — это упрощает настройку, диагностику и поддержку.
- Одинаковые монтажные размеры. Стандартные паттерны (20×20, 30×30 мм) обеспечивают взаимозаменяемость в производстве и сервисе.
- Запас по температуре. Уточняйте максимальную рабочую температуру MOSFET и реальные условия эксплуатации: температуру окружающей среды, наличие и скорость потока воздуха.
- Входной контроль партии. Проверяйте пайку, наличие конденсаторов и TVS-диодов, а также соответствие маркировки.
- Наличие телеметрии и логов. Для сервисных платформ телеметрия RPM/ток/температура — уже не опция, а рабочий инструмент диагностики.
- Ремонтопригодность. Для тяжёлых платформ одиночные ESC часто выгоднее: замена одного канала дешевле, чем замена всей 4-in-1 платы.
- Прослеживаемость по партиям. Фиксируйте серийные номера и версии прошивок для каждой единицы — это упростит анализ отказов и работу с рекламациями.
- Совместимость с FC и моторами. Проверяйте совместимость по протоколу, S-диапазону и монтажу до закупки всей партии, а не после.
- Допуски по входному напряжению. Убедитесь, что ESC выдерживает пиковое напряжение батареи (4,2 В × число ячеек) с запасом.
- Наличие защитных элементов. TVS-диод и low-ESR конденсатор на входе — обязательные элементы для надёжной эксплуатации.
Для серийной сборки это особенно важно: одна мелкая несовместимость в пилотной партии легко превращается в повторяющуюся сервисную проблему на всём тираже.



